
Dense Pedestrian Detection
Published:
密集场景下的人群检测
行人检测论文汇总:https://www.starlg.cn/2018/08/17/Pedestrian-Detection-Sources/
1. Repulsion Loss: Detecting Pedestrians in a Crowd
face++(2017.11)CVPR2018
行人检测:类内遮挡(crowd遮挡)
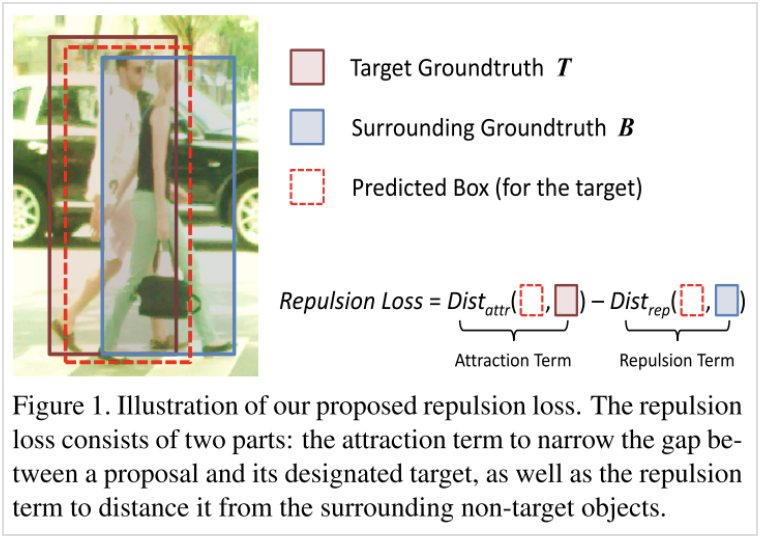
问题:行人T与B重叠时,检测器检测到的行人特征相似,原本应该检测T的bbox偏移到B上。
解决:提出Repulsion损失
- 要求:pred_box不仅接近目标T,并且远离周围的GT_box
- 即:目标的吸引、目标的排斥
- Figure1:pred_box偏移到B时会产生惩罚
Repulsion Loss:https://blog.csdn.net/gbyy42299/article/details/83956648
Repulsion loss定义:$L=L_{Attr}+\alphaL_{RepGT}+\betaL_{RepBox}$
$L_{Attr}:$即smooth l1损失,让pred和gt更接近
$L_{RepGT}:$使得pred_box $P$和周围的非目标框$G$尽可能远离($G$是除匹配上的目标框意外的IOU最大的目标框,即和它overlap第二大的gt_box)
使用IOG而不是smooth l1 loss:若使用smooth l1 loss来进行pred_box和非目标框的排斥,只会让距离线性的增加,确保越远远好;但是IOG这类用交集区域来衡量loss的,却是检测框衡量的实质,只关注于最小化与非目标框的重叠区域。
IOG 而不是IOU:使用Intersection over GT(IOG)而不是IOU,因为如果使用IOU,网络可以学习到放大pred_box来包含gt_box就能够使得距离最小(因为当$B^P$完全包含$G_{Rep}^P$时,IOU的分子部分交集时是固定的,而可以通过分母部分,扩大pre_box的面积,则并集的面积会增大,达到减少IOU的目的,但是实际上overlap区域并没有减小,没有达到实际效果),这并不是我们想要的,而我们使用$IoG(B,G)=\frac{area(B\cap G)}{area(G)}$,确保分母面积不改变,就可以规避这样的问题,只会要求分子overlap的区域减少
计算RepGT,当IoG越大,RepGT的loss就越大: \(L_{RepGT}=\frac{\sum_{P \in P_+}Smooth_{ln}(IoG(B^P,G_{Rep}^{P}))}{|P_+|}\)
\[Smooth_{ln}= \begin{cases} -ln(1-x), & x \leq \sigma \\ \frac{x-\sigma}{1-\sigma}-ln(1-\sigma), & x > \sigma \end{cases}\]Note:$P_+$为所有positive的proposals,$B^P$为预测的positive的box,G为gt_box。$\sigma$是一个调整$L_{RepGT}$敏感程度的超参数,$\sum$和$ P_+ $相当于取平均
$L_{RepBox}:$使得pred_box $P_i$和周围的其他pred_box $P_j$尽可能远离,分别匹配上不同的gt_box,采用IOU来衡量距离 \(L_{RepBox}=\frac{\sum_{i\neq j}Smooth_{ln}(IoU(B^{P_i}, B^{P_j}))}{\sum_{i\neq j}1[IoU(B^{P_i},B^{P_j})>0]+\epsilon}\)
2. Occlusion-aware R-CNN: Detecting pedestrians in a Crowd
中科院(2018.7)
目标:解决人群遮挡
主要:优化目标+网络结构
优化目标:
$L_{reg}$:预测框逼近gt框
$L_{com}$:属于同一gt框的多个预测框尽量集中

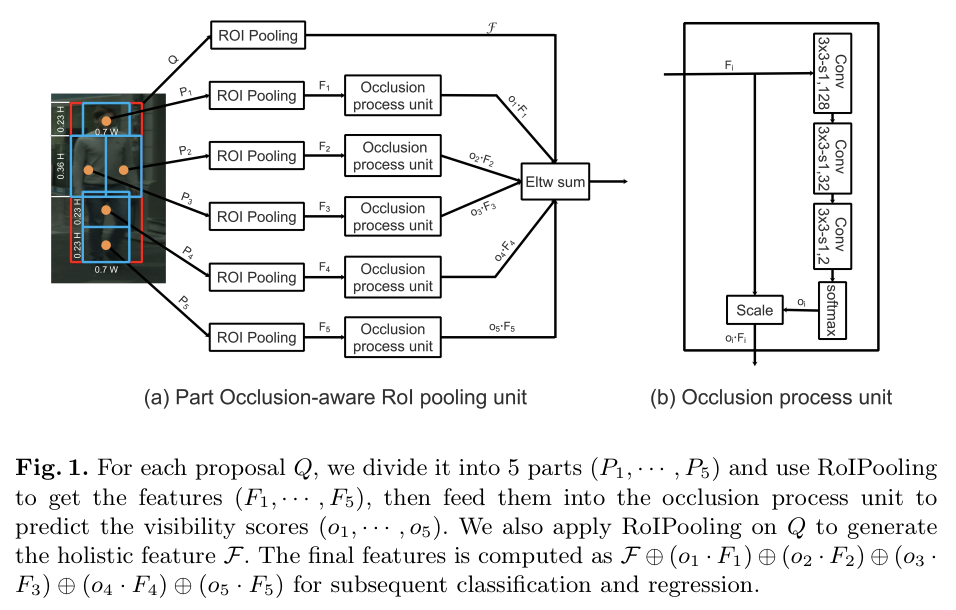
网络结构:
修改ROI Pooling:人体具有特殊的结构,利用这个先验,将ROI区域切分出5个子区域,蓝色所示。对每个蓝色框经过ROI Pooling操作后变成$m\times m$的特征图,再将特征进行element-wise sum,将5个局部的特征合并与1个整体的特征合并,去做最后的分类和回归。
my_opinion:仅仅做element-wise sum,缺乏严谨性;可能需要更合理的特征融合方式。
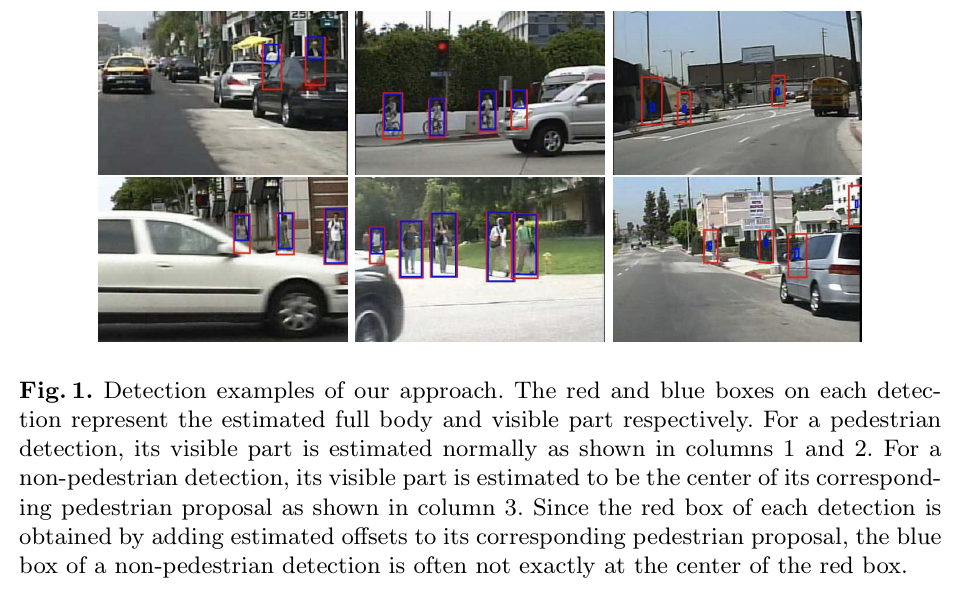
4. Bi-box regression for pedestrian detection and occlusion estimation 2018
利用一个网络:行人检测+遮挡估计(即并行两个分支,分别输出两个bbx,一个完整的行人框,另一个行人的可见部分框)
网络结构图
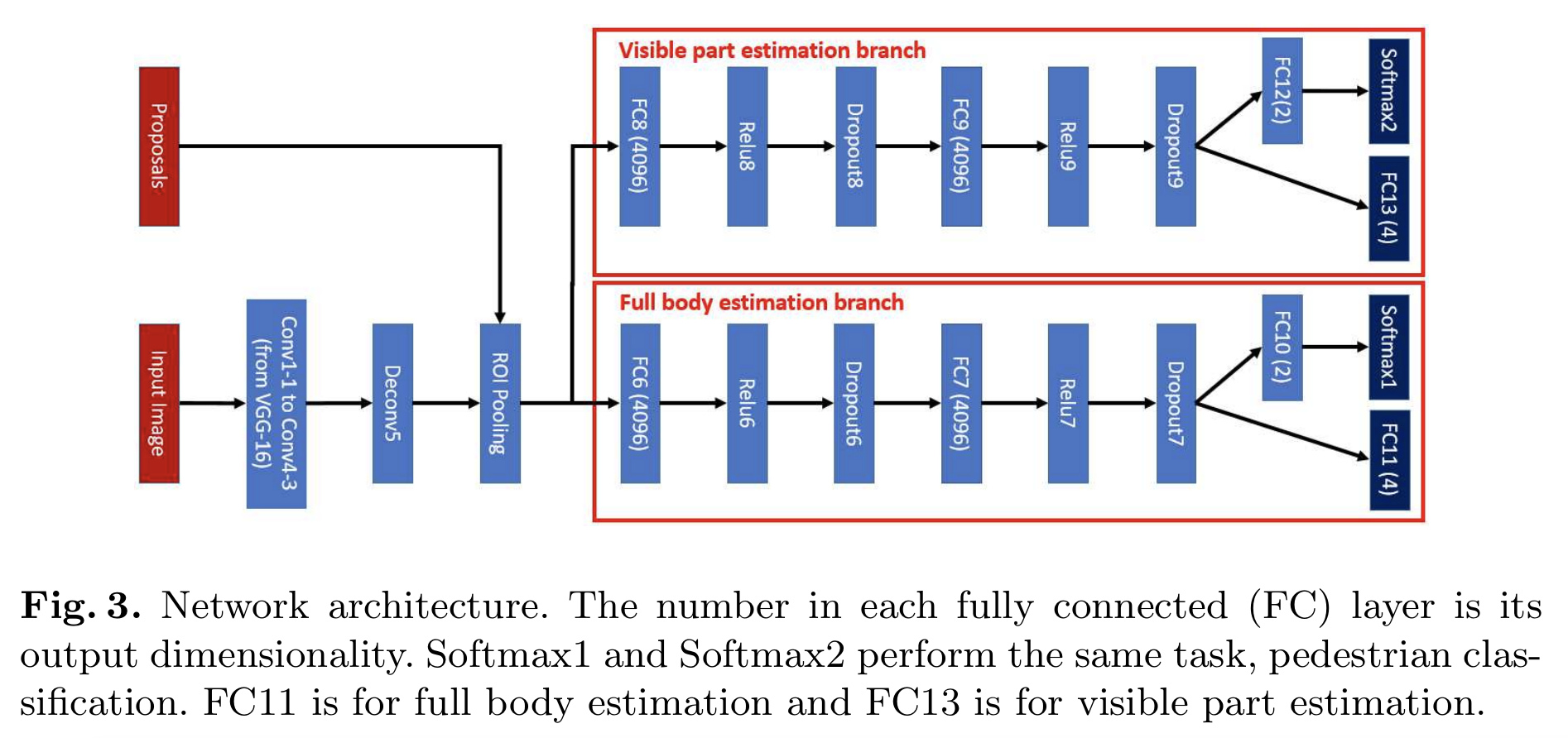
整体估计分支处理流程与通用目标检测一致
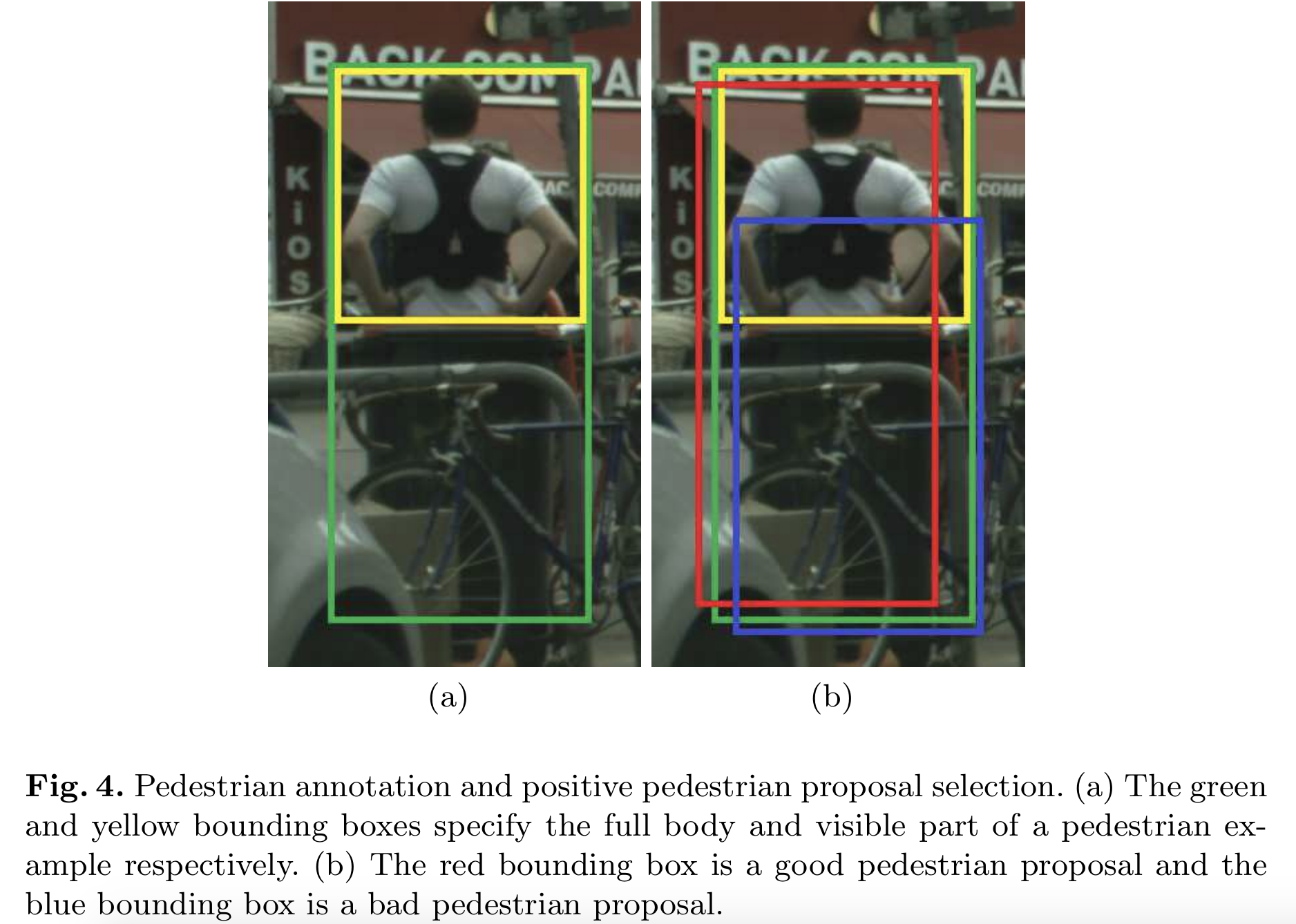
可见部分估计分支
正样本条件:proposal不仅要和整个标注框的重叠程度大于一定阈值;还要和标注框内行人可见部分重叠程度大于一定阈值。(蓝色框满足前者条件,但是不满足后者条件,所以不作为正样本)
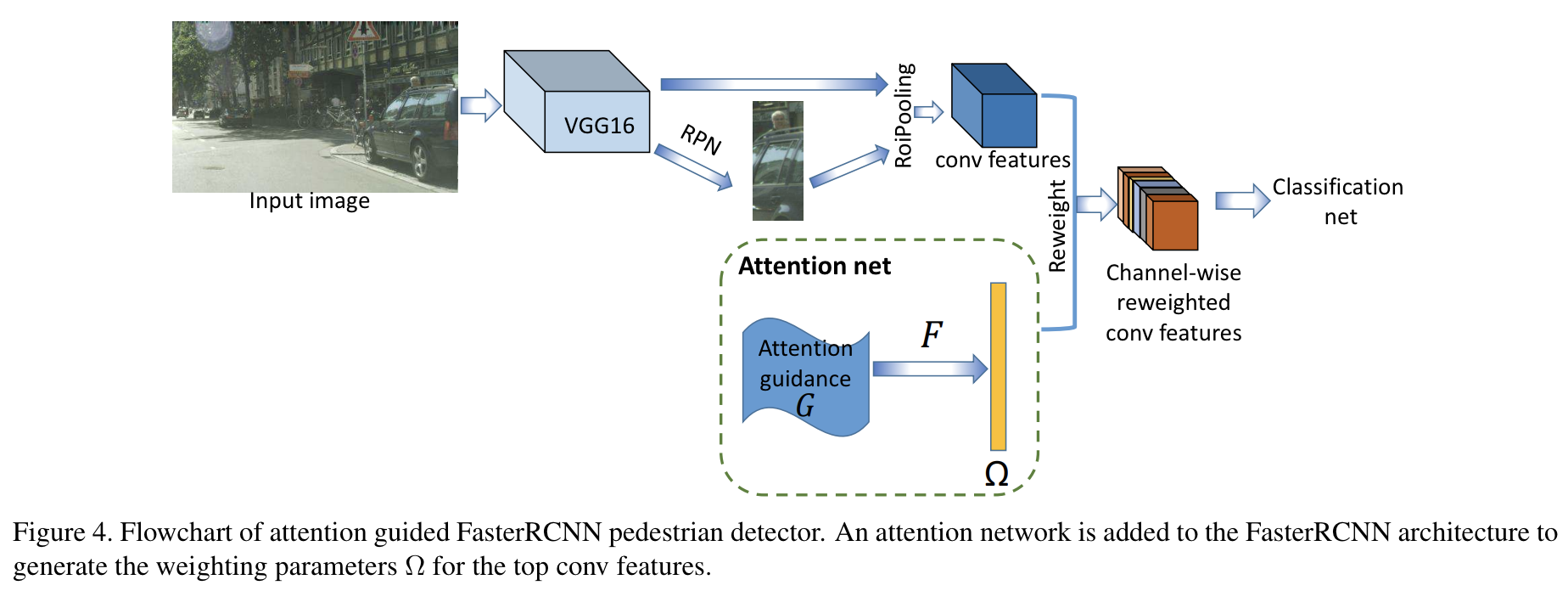
5. Occluded Pedestrian Detection Through Guided Attention in CNNs 2018
- 正常的FasterRCNN结构+attention网络
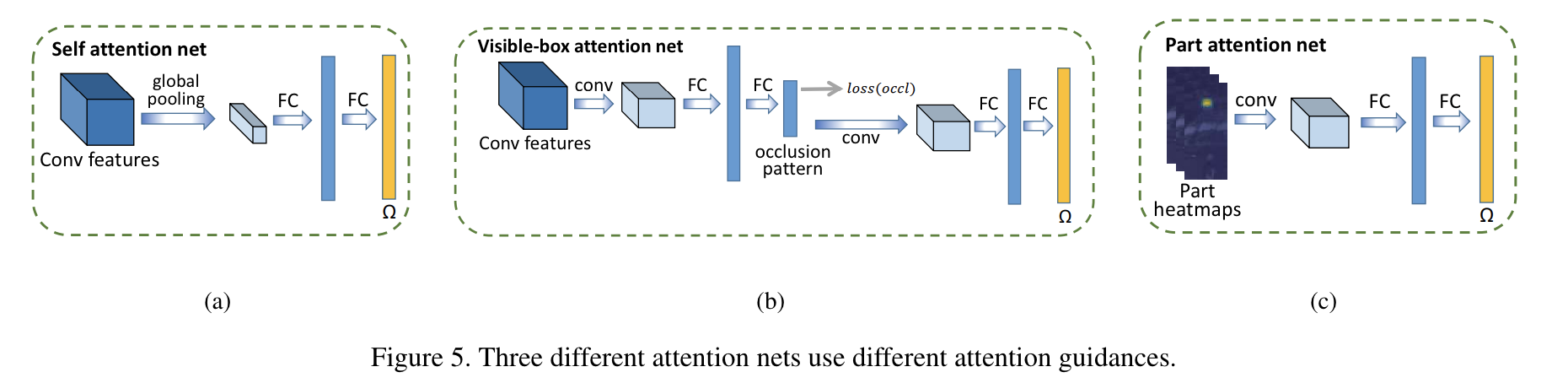
- attetion network
- Self Attention Net:channel-wise attention(SE block)
- Visible-box Attention Net:对人体可见部分建模(估计可见部分框)
- 提出一个occlusion pattern(类似内嵌小网络):预测可见部分的4个类别(全部可见、上部可见、左侧可见、右侧可见)
- Part Attention Net:
- 认为visible-box有时可能出现的不规律,不好分类到4个类别
- 对visible-box的训练代价大
- 使用body part detection作为额外的监督(head、shoulder、arm,etc)
- 在行人检测数据集上,没有body part的标注;则选择采用预训练的part detection网络(在MPII Pose数据集上);该网络提供14个人体关键点,不用再在行人检测数据集上finetuning,就可以有好的效果。
- 使用 人体关键点检测网络 中的特征(具有较好的对人体特征的响应)来作为有效的特征表示来监督attention network
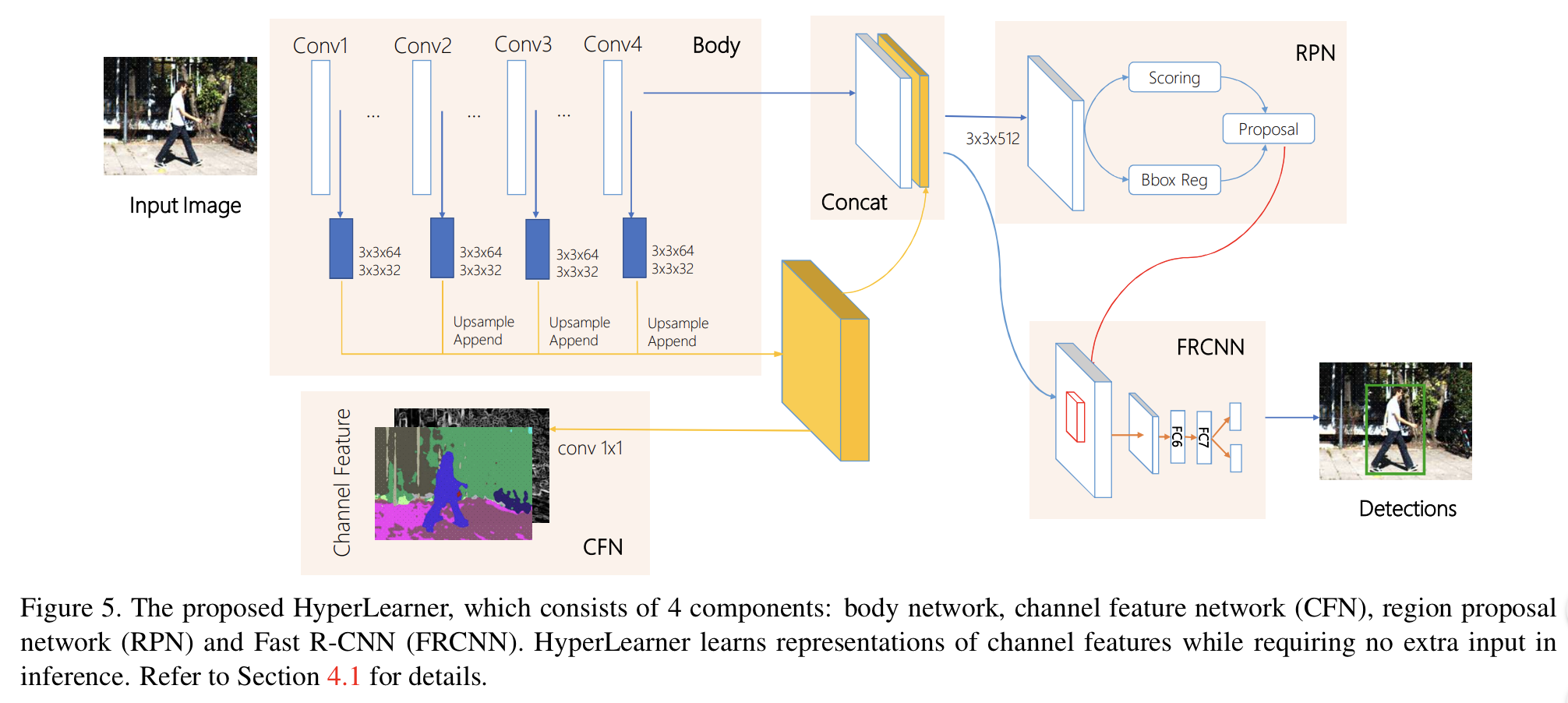
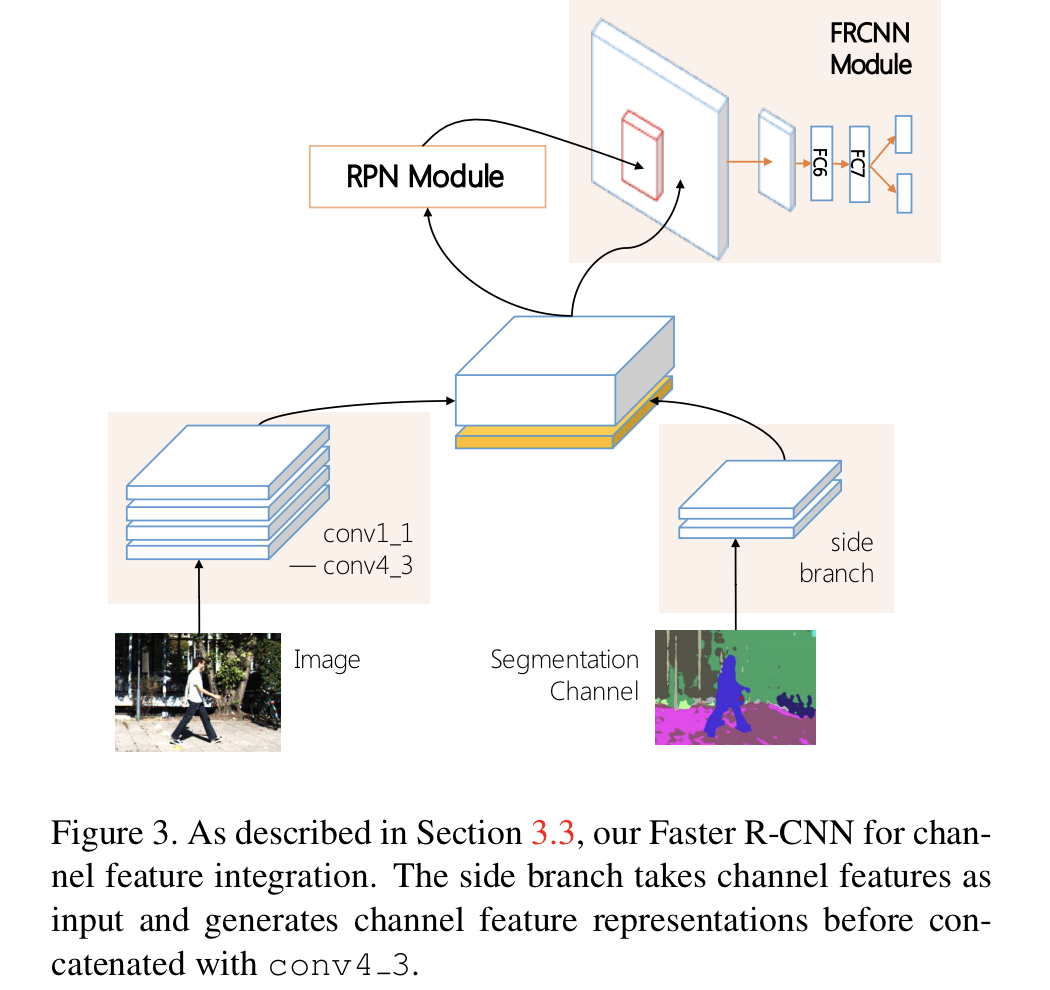
6. What Can Help Pedestrian Detection? 2017
- 存在的问题:
- 行人与背景的辨识度小
- 密集场景:人与人之间的边界模糊
- 解决:用额外的特征提升行人检测器的性能
- 实验:
- 采用梯度、分割、热力信息
- 时间序列
- 深度通道
- 最后采用像素分割作为额外的特征监督;提取conv1_2/conv2_2/con3_3/conv4_3的特征图进行channel cocncat,再通过全卷积的结构,生成通道特征。再将通道特征concat到原body network上,输入RPN和FRCNN。
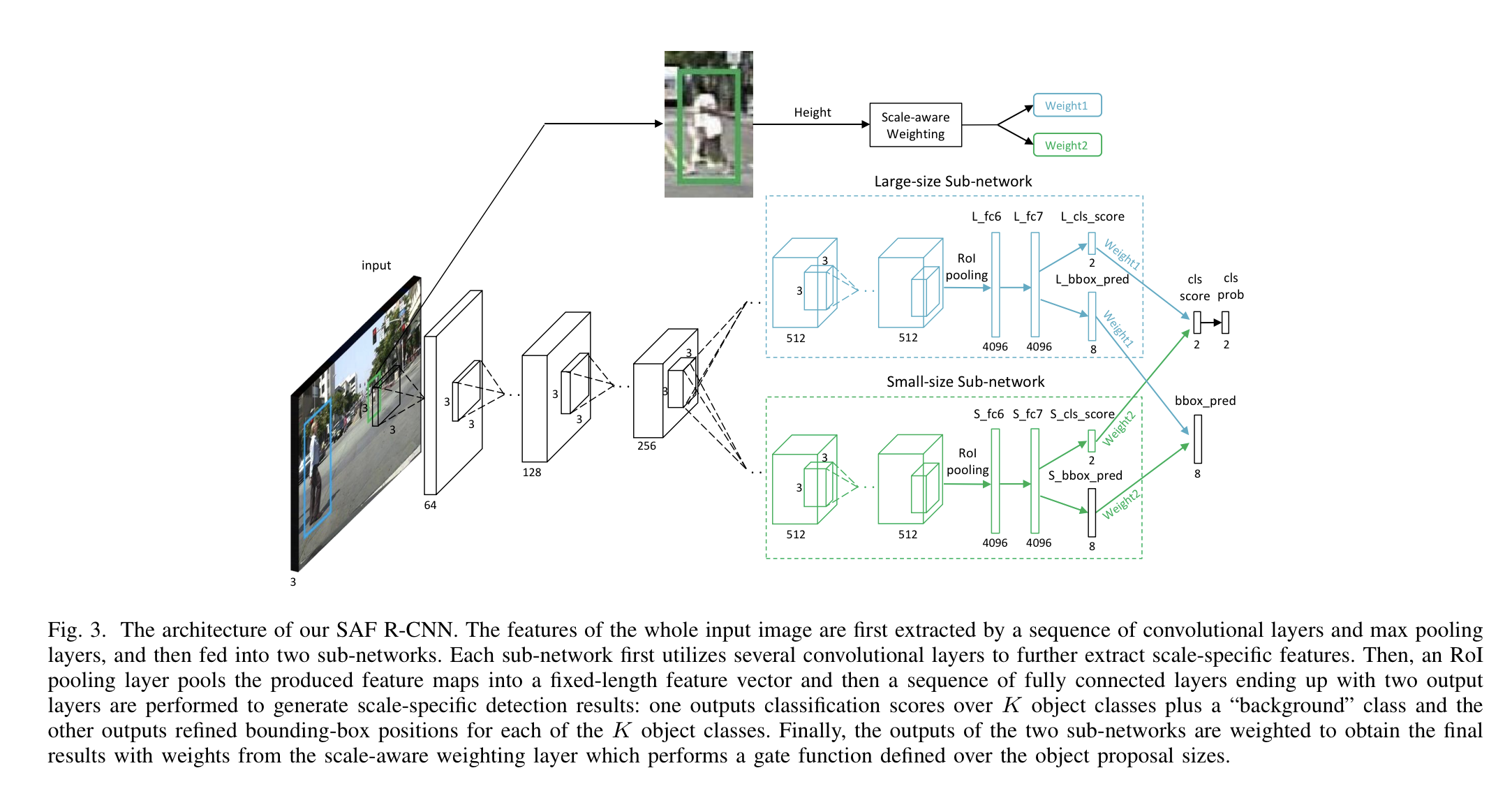
7. Scale-aware Fast R-CNN for Pedestrian Detection 2015
- 问题:行人尺度,根据距离远近,行人具有相差极大的size,且特征表示差异也极大
- 解决:在一个网络中设计大、小网络,大网络针对大size的行人检测;小网络针对小size的行人检测;
- 使用scale-aware加权层作为门函数;该层根据proposal的高度(宽度随着行人姿态的变化很大)来判断行人的size。根据proposal的size来判定给大小网络分别赋予不同的权重。
- 最终将大小网络的预测结果进行reweight,输出最终结果
8. JointNet 2019
使用head和body同时来检测在crowd scene下的人体
Algorithm1:
$IoH=\frac{Area\ of\ Overlap}{Area\ of\ Head-box}$
$H$为人头检测得到的集合(NMS之后),$B_1,B_2$为行人检测得到的集合(NMS之前后之后的)
- 寻找不能匹配的head,加入到$H_m$中
- 对每个head,遍历所有body(这里的body遍历的是NMS之后的body),如果他们的$IoH> \lambda$,就把他们这个配对的score加入到集合中;最后从这个集合选取最大的score值如果$<\beta$,就说明是未被匹配的head
- 不能匹配的head有两种情况:(1)本应该与该head匹配的body由于occlusion被NMS抑制;(2)这个head本身就是一个false positive(虚警)
当按以上的方法得到$H_m$之后,再使用一遍后处理方法,根据score小于low_thresh或大于high_thresh,删除或增加这个head与其对应的body
- 得到不能匹配的head($H_m$),根据其和body的overlap值,如果大于high_thresh,说明是和当前已有的body框有较大overlap,但是它又是未匹配的head,所以大概率是本应该与其匹配的body由于occlusion被NMS抑制,这种head应该add它的body(这里的body遍历的是NMS之前的body);而如果overlap小于low_thresh,说明确实是一个false psitive,应该delete