Depth Completion
Published:
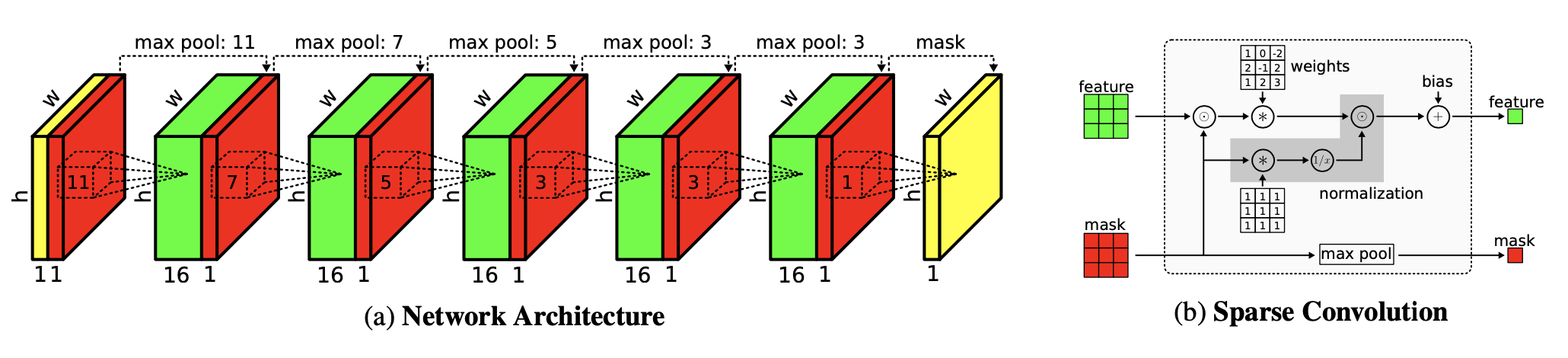
1. 《Sparse Invariant CNNs》2017
Method:
- 提出一个能显式考虑缺失数据location的卷积操作——
Sparse RCNN - 提出了针对稀疏输入的数据的特殊CNN结构(同时处理
mask和input) - 提出了堆叠的sparse CNN的网络结构,kernel size从11x11逐渐递减到3x3
- 提出sparse数据的skip connection结构
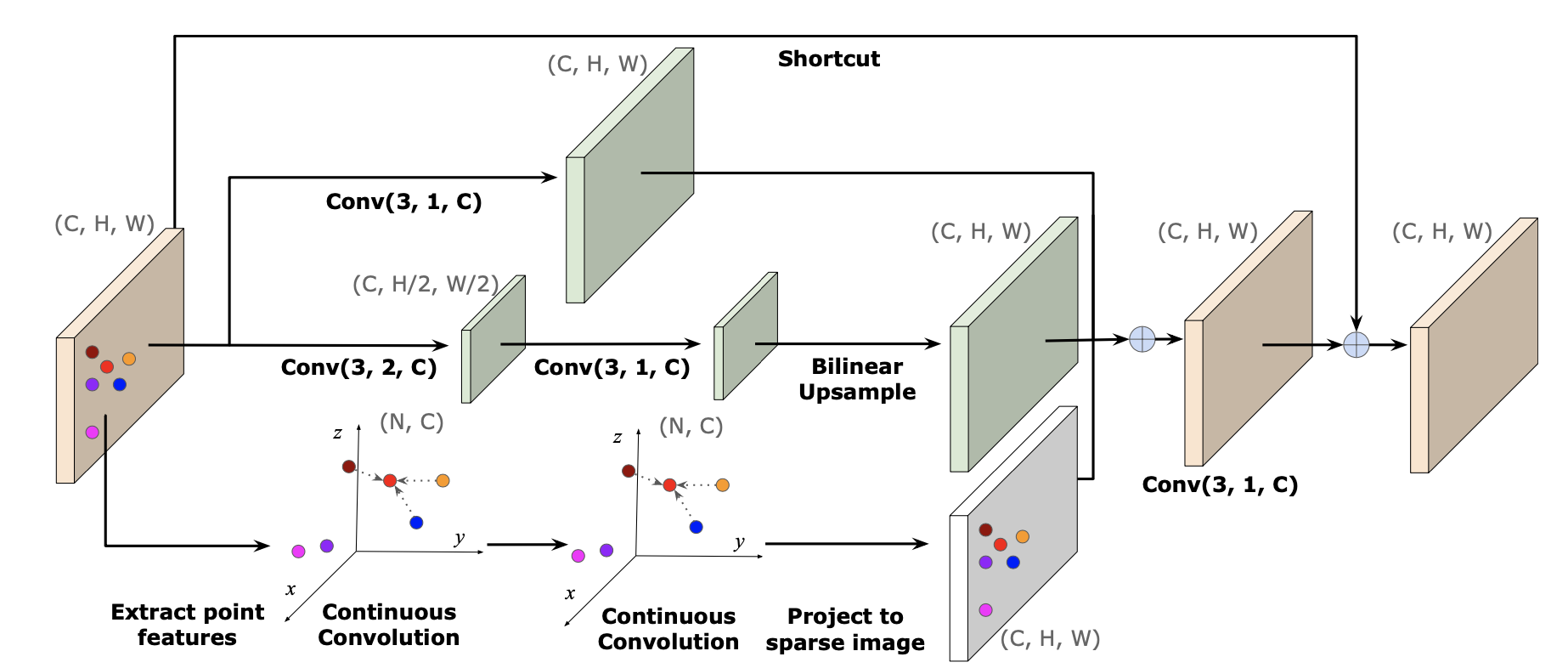
2. FuseNet2019
《Learning Joint 2D-3D Representations for Depth Completion》
- 提出了2D-3D Block的模块:该模块同时获得2D的特征,以及3D的特征(在3D点云中寻找该点附近的点云,通过MLP编码,计算邻近点云的特征来表示对该点云的权重),将2D的特征和3D的特征融合,输出这个block的最终特征
- 第一条branch为多尺度的2D conv(由绿色的上下两个scale组成,第一个scale是stride=1的,第二个scale是stride=2的)
- 第二条branch是2个continuous convolution(对点云进行操作的),最后把点云进行投影到2D平面空间。
- 把两条branch融合(仅使用element-wise sum),得到这个2D-3D block的输出
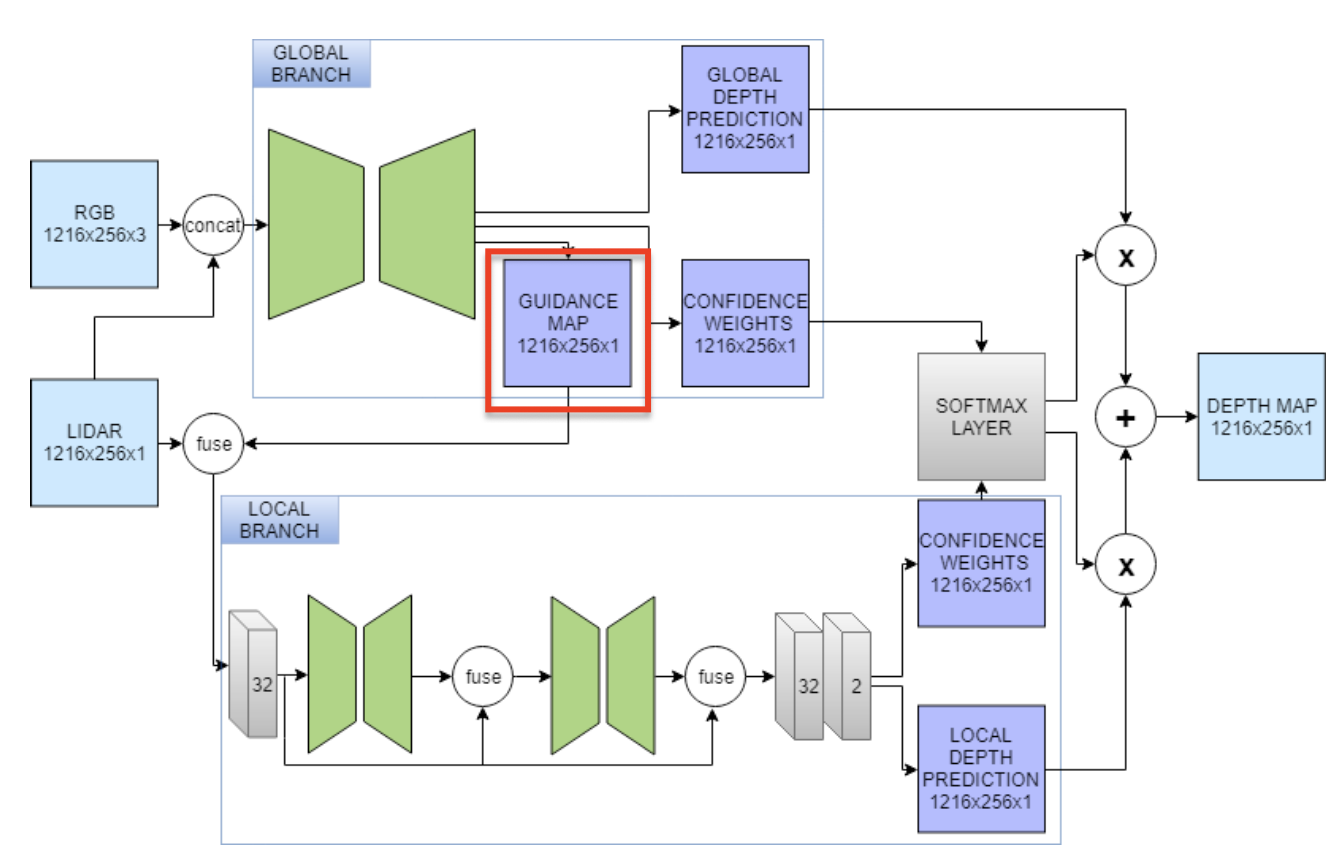
3. 《Sparse and noisy LiDAR completion with RGB guidance and uncertainty》2019
- 提出global和local信息的概念(采用双分支结构)
- global:LiDAR数据缺少或不正确的区域(物体边界)【使用RGB来指导预测depth】
- local:LIDAR数据充足的地方
- 提出特征融合策略(采用early fusion和late fusion)
- early fusion:global的guidance map来指导LIDAR
- late fusion:confidence map作为权重来指导两个branch的融合
- 提出
confidence mask(指引不确定性区域)
4. 《Self-Supervised Sparse-to-Dense: Self-Supervised Depth Completion from LiDAR and Monocular Camera》2019
设计网络:学习一个映射,从稀疏深度到密集深度
提出了一个self-supervised网络(不需要密集的depth标签)
- 不用密集的gt_depth作为标签(所以是自监督的)
Photometric loss:对前后帧用PnP解决(对前后帧的特征点先匹配,代码中这是对数据的预处理中做的,采用的是SIFT算法,描述前后帧的特征匹配),计算相机位姿变换,用根据位姿变换生成的rgb图和标准的rgb图计算误差,评估相机位姿的准确性(即间接评估了预测深度的准确性)。Depth loss:计算存在depth区域的depth预测准确度
补充:PnP算法:通过一组对应的图像2D点和其在世界坐标系下的3D点,求解出相机坐标系下的3D点,将相机坐标系下的3D点和世界坐标系下的3D点计算得到相机位姿。【同理把世界坐标系下的3D点看成是上一帧相机坐标下的3D点,就能求出两帧之间相机的变换矩阵】
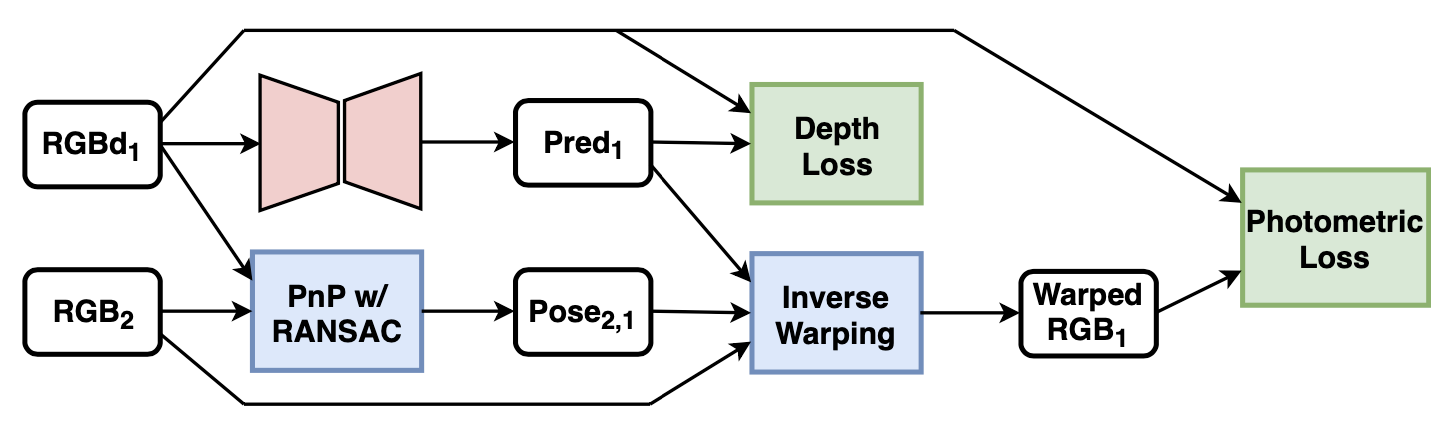
白色方框:变量
红色:depth网络
蓝色:计算模块(无可学习的参数)
绿色:损失函数
training:需要当前帧$RGBd_1$和相邻帧$RGB_2$提供监督信号($RGBd=RGB+depth$)
inference:只需要当前帧$RGBd_1$作为输入,输出预测深度$pred_1$
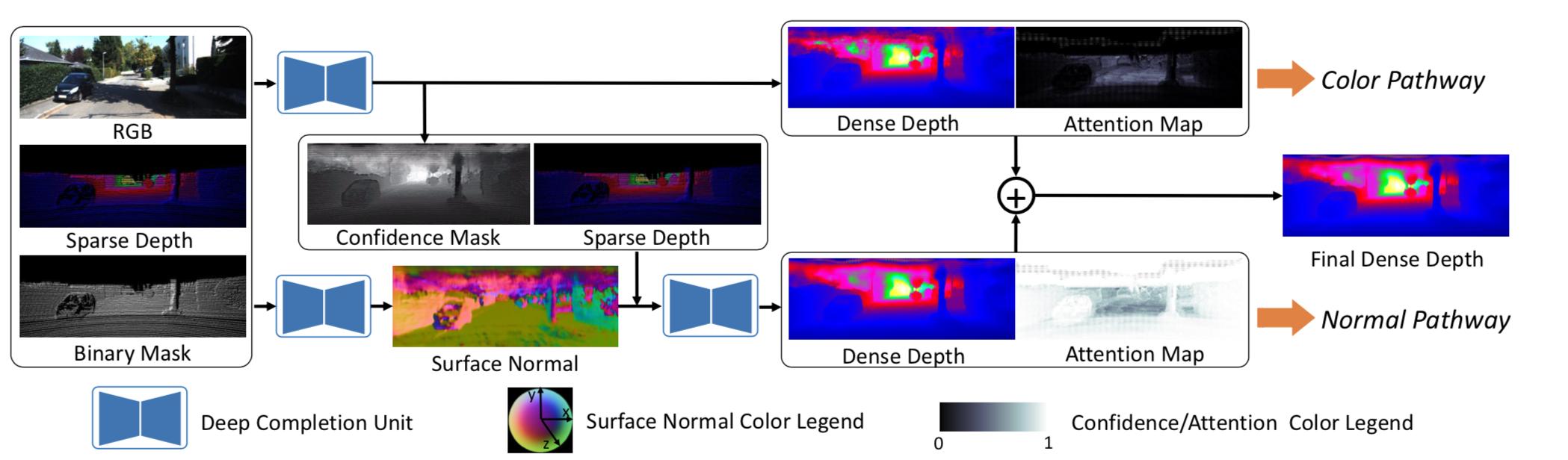
5. DeepLiDAR2019
Method
- 提出从sparse LiDAR depth+surface和color image(分别预测dense depth)【surface normal是预先计算得到】
- 提出encoder-decoder结构(DCU模块):融合
sparse depth和color image - 学习一个confidence mask来解决遮挡;生成attention map来融合depth(来自两个pathway的color image和surface normals中的深度预测)【confidence mask(降低在遮挡区域的权重)来解决混合的雷达信号】